The chassis subsystem consists of our 1/10 scale RC drift car, mounting assembly, and protective bumpers.
Below is our final robot design:
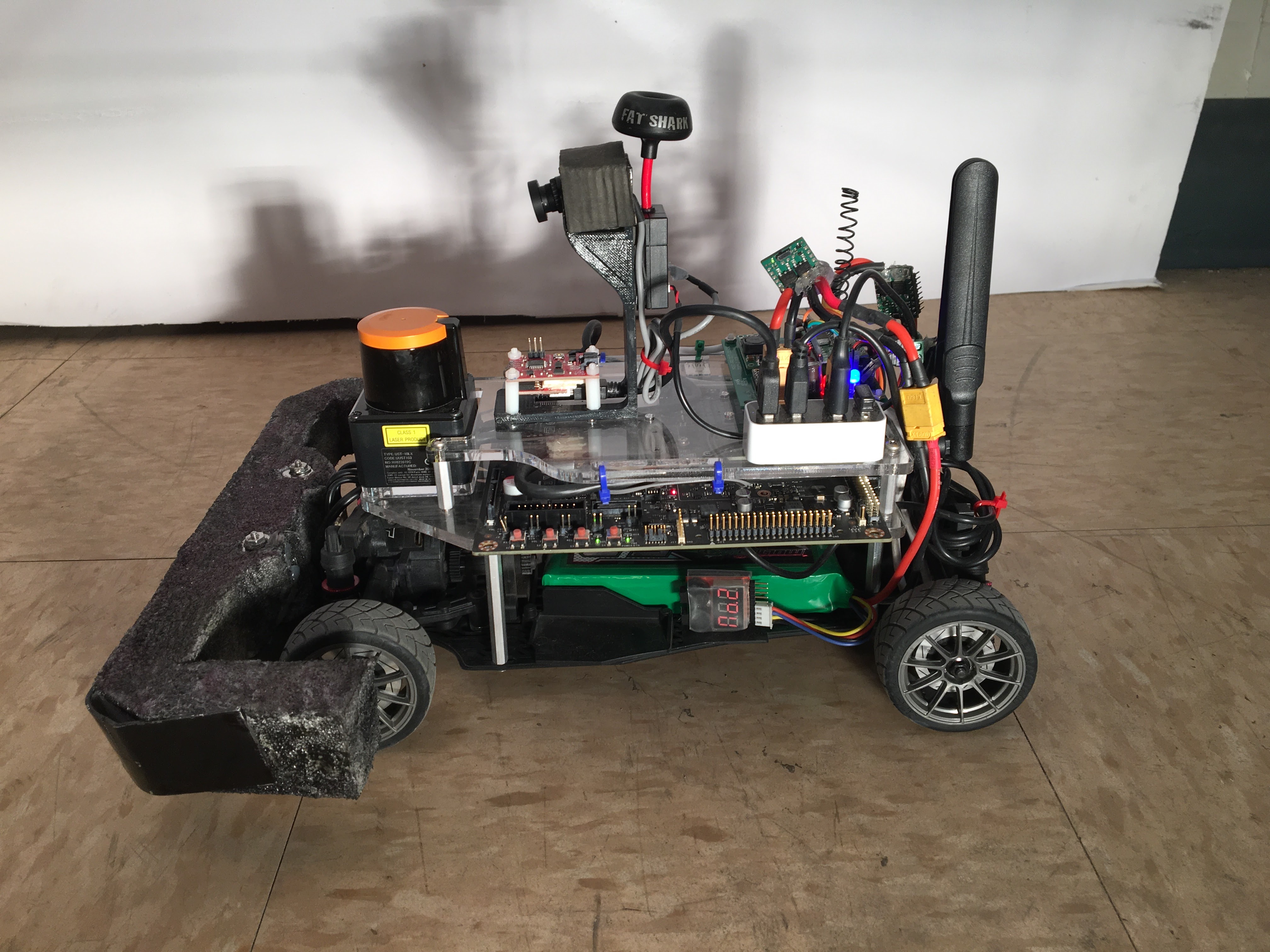
At the beginning of the spring semester, we transitioned to a new chassis: MST FXX-D RWD. This chassis was more robust mechanically, and gave us better handling capabilities than our previous chassis. In addition, it was rear-wheel drive as opposed to all-wheel drive, which allowed us to match our chassis to our dynamics model.
We also made the change from 3D printed mounting plates to laser-cut acrylic plates, mostly for speed and reliability of fabrication. During this redesign, we decided to remove the extra Energizer battery we had used to power the computers, and switch computing to an Nvidia Jetson TX1. With the removal of the Energizer battery, we were able to significantly reduce the robot’s weight, as well as lower the center of gravity. In terms of mass, our fall semester robot was the scaled down equivalent of a large SUV, while our spring semester robot was closer to a Tesla Model S.
Our spring semester design proved to be very robust to crashes: throughout the semester, it suffered several hard crashes, yet only required minor fixes and did not set us back in our schedule.
A side-by-side comparison of our two platforms:

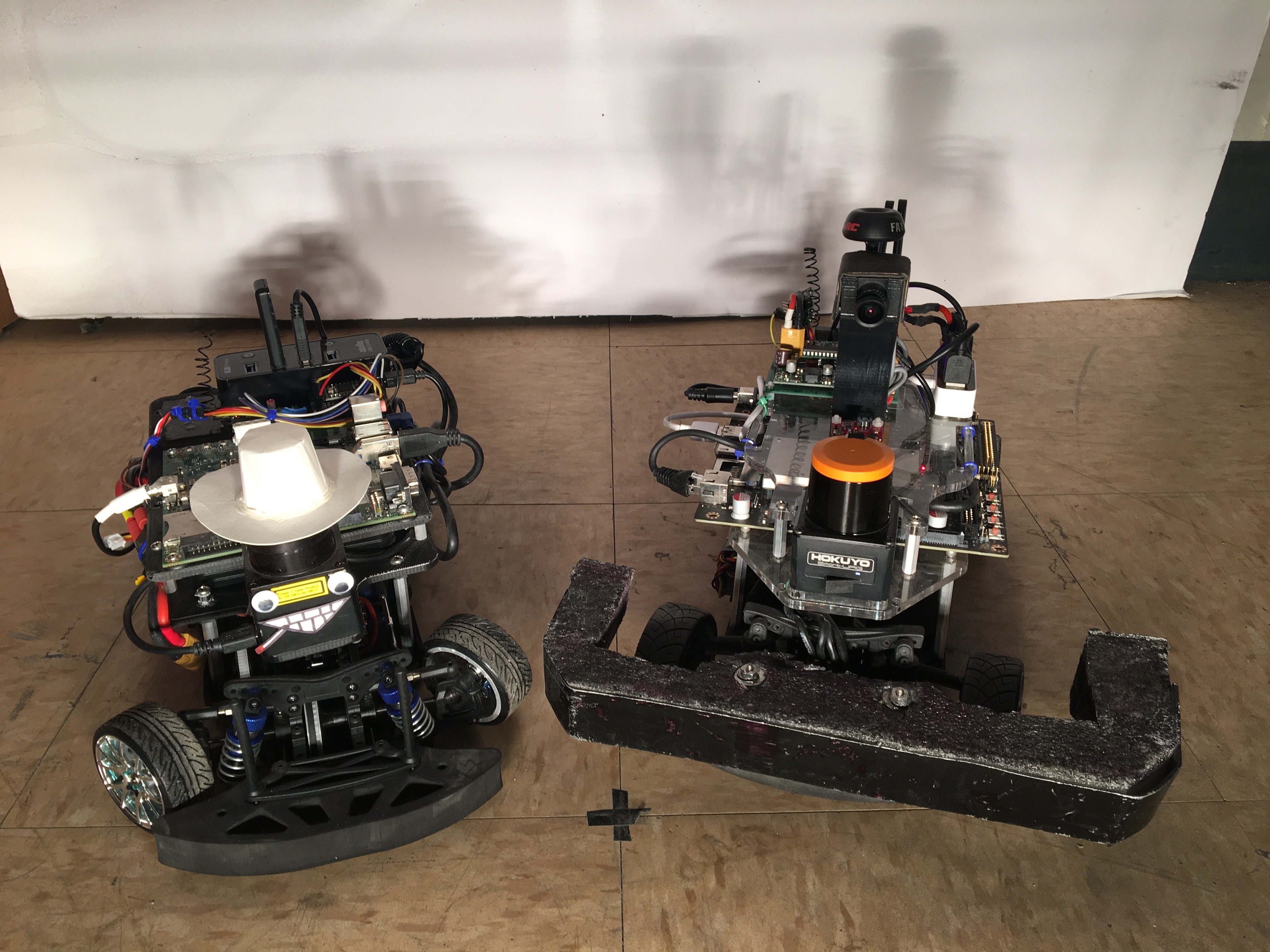
In the fall semester, we were using a 1/10 scale Hobbyking Mission-D 4WD Drift Car for our RC drift car platform.
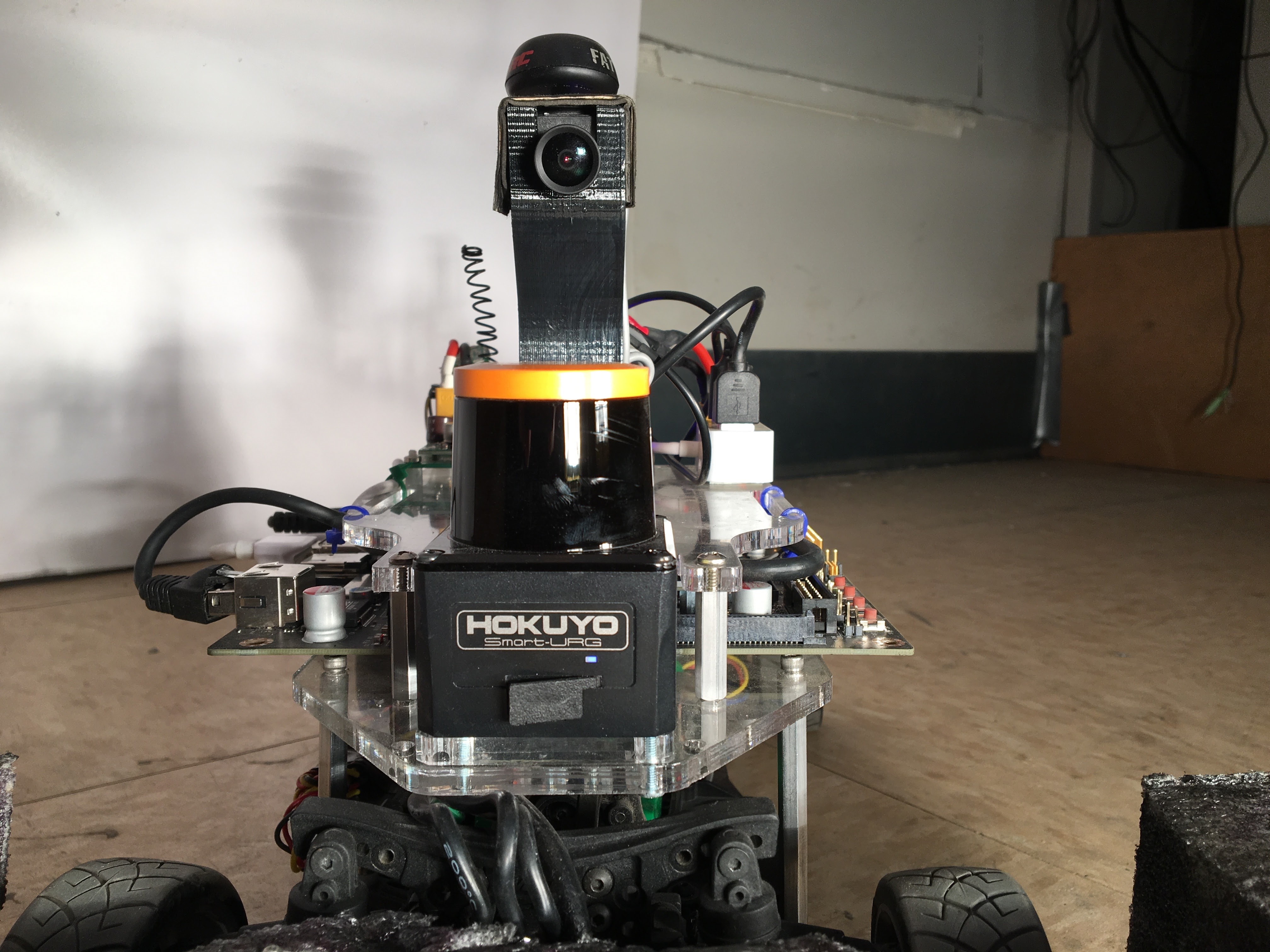
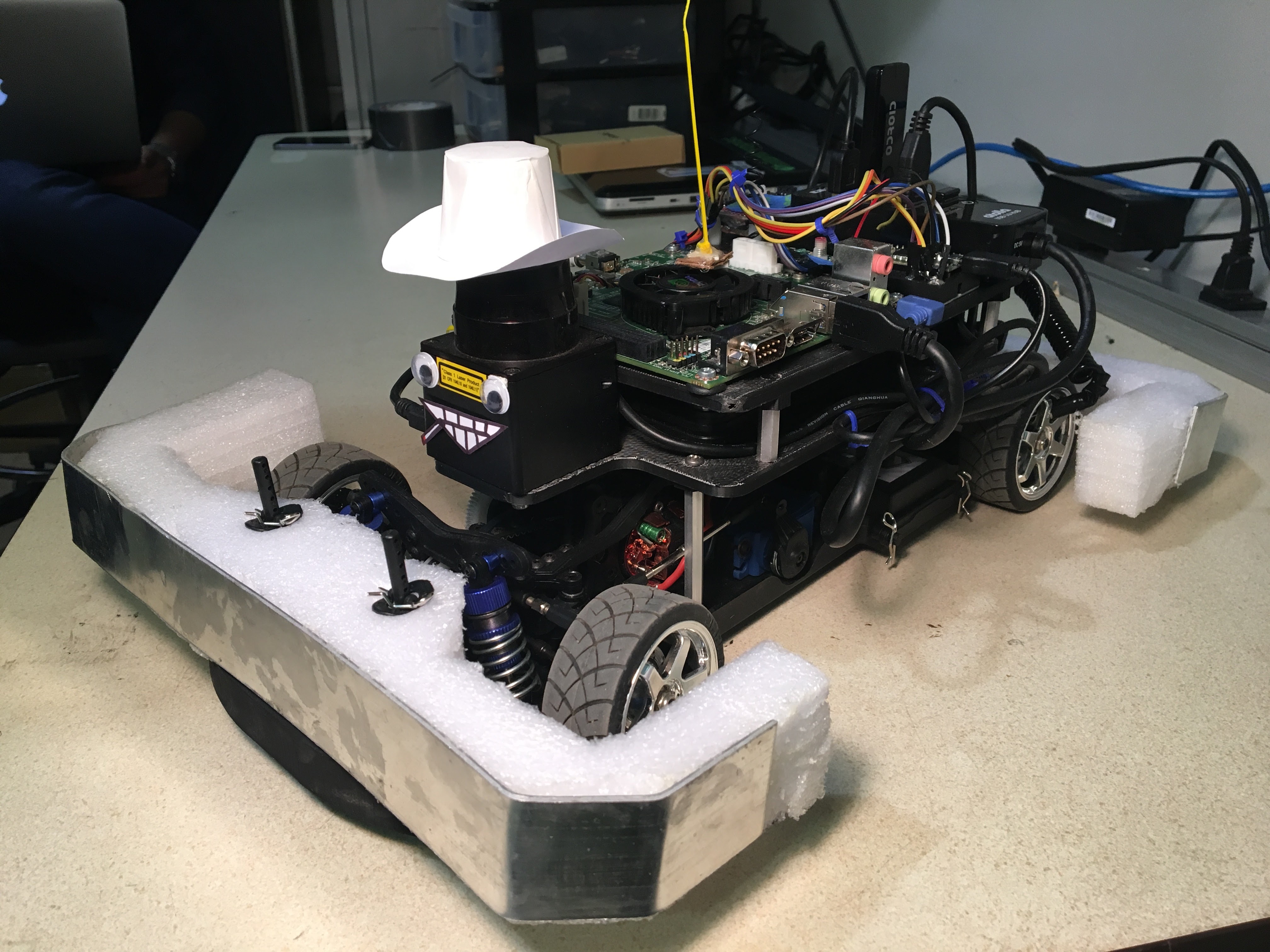
We designed a mounting assembly to go on top of the RC drift car, which houses the second battery, Jetson TK1 single board computer, USB hub, IMU, and Lidar. The mounting plates are 3D printed in ABS.
The robot also has protective bumpers on its front and back sides, to prevent damage in the event of crashes and other mishaps. The bumpers are made of foam and aluminum plates, and mounted directly on to the chassis.
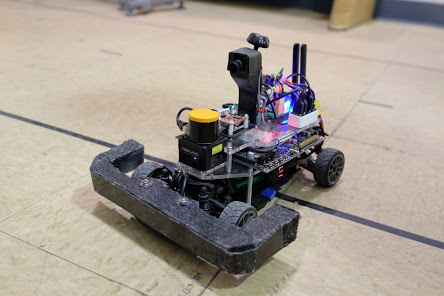
Here is our robot, as of November 18th:


Updated robot, end of fall semester December 12th:
We will be moving to an MST chassis for spring semester, which will give us a more robust frame and rear wheel drive.