Evasive Maneuvers and Drifting for Autonomous Vehicles
Bad drivers kill people. There are more than 5 million road accidents that take place every year in the US alone, resulting in 30,000 fatalities and 2.3 million injuries. Globally, there are more than 1.2 million deaths per year as a result of these accidents, 93% of which can be attributed to some to some or the other form of human error. These statistics themselves make a good case for the proliferation of advanced autonomy in vehicular transportation. It is almost inevitable that our society will start making the transition towards putting autonomous vehicles on the road over the coming decades.
However, a world full of both bad human drivers and semi-intelligent vehicles can be the subject of nightmares. Such a world brings with it a plethora of complex driving situations that human drivers may not see coming, and that semi-intelligent cars aren’t yet capable enough of dealing with effectively. Be it suddenly appearing obstacles or unfavorable driving conditions, humans and autonomous vehicles tend to respond differently in different circumstances. Such situations are starting to be discussed extensively from technological, ethical, as well as legal perspectives.
We aim to develop a system that utilizes complex maneuvers such as drifting in order to equip autonomous vehicles to tackle emergency situations. Modern automobile Electronic Stability Control systems are based on the principle that keeping a car’s tires from slipping is always the best response; however, we believe that we can achieve increased flexibility in evasive maneuvers if we embrace drifting as a valid control method. This is true especially in high-speed, low-friction situations. We take inspiration from the techniques that rally car drivers use to maintain high speeds on suboptimal road surfaces (like dirt, gravel, and snow/ice) while negotiating tight corners and elevation changes, operating frequently in the tire saturation region.
We aim to showcase our system with the two emergency situations below:
- Avoiding a static obstacle that suddenly appears in front of the vehicle: Current autonomous driving planners/controllers can fail to generate a safe plan, particularly in emergency situations. The main reason is that planners are designed to produce comfortable trajectories for human passengers under normal driving conditions. High-performance evasive maneuvers are necessary to avoid collision under extreme conditions, and it is necessary to invoke a special planner/controller in order to react safely to such conditions. This situation borrows elements of the Moose test, which is frequently used to test the stability of automobiles when swerving at high speeds: Moose test
- Avoiding a dynamic obstacle that approaches the car at high speed from the side: This is a typical T-bone accident, in which a vehicle is impacted on its side by a vehicle approaching perpendicular to its trajectory. We believe that drifting will allow the car to change its heading quickly, in order to minimize damage or avoid an accident altogether.
Use Case
It is the year 2030, and Hugo is on a road trip, driving up a two-lane mountain road to somewhere in Sweden. At this point in time, 50% of cars on the road are fully autonomous vehicles. This includes Hugo’s car: the new Tesluber Model ABC, additionally equipped with evasive maneuvers at friction limits as part of the onboard Advanced Drift Assistance System. After setting the destination and pressing “Go,” Hugo has been in the backseat hanging out with his family (with seatbelts on, of course).
It starts raining heavily, and the visibility decreases to 10 meters. The car is travelling at 80km/hr. Suddenly as the car turns a corner, a 10 foot long, 1500 pound moose walks into the middle of the road. The distance between the moose and car is shrinking rapidly. Meanwhile, Hugo and his family in the back seat are blissfully unaware of the situation.
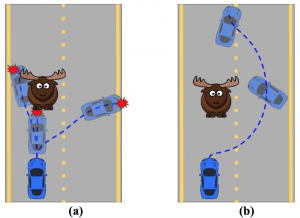
Possible trajectories of Hugo’s car: (a) without ADAS (b) with ADAS
Fortunately, the Tesluber Model ABC saw this coming. It identified the moose as a threat as soon as it turned the corner, and started planning potential paths to avoid contact. At first, it tries to plan a trajectory that minimizes jerk and keep the tires within friction limits, because rider comfort is a priority. However, because of the slick road surface and the car’s high velocity, it quickly finds that there are no possible trajectories that fulfill these conditions and avoid hitting the moose. This is where the new drifting features on the Advanced Drift Assistance System kick in: it plans a path around the truck where it flicks the steering wheel to induce slip in its rear wheels (similar to the “Scandinavian Flick” technique used by rally car drivers). Because drifting allows more flexibility in control of the lateral forces on the car, the vehicle would be able to skid past the obstacle without contact. The car plans to maintain this drift until it is safely on the other side of the moose, then resume normal driving. All of the above happens in milliseconds, thanks to the Tesluber’s efficient localization and planning algorithms.
The vehicle executes this maneuver perfectly, modulating its steering and throttle inputs in response to slight variations in the road surface. It goes on to drive Hugo safely to his destination. Hugo’s kids grow up in a world where they can’t imagine death from car accidents as a leading cause of death for teenagers.