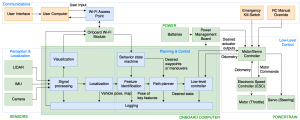
Our cyberphysical architecture diagram outlines the flow of information and energy in our system. The communications subsystem will provide our user interface and emergency safety systems. Commands from the user will be channeled to the onboard computer. The onboard computer takes in the command and sensor data to generate a feasible trajectory for the robot, which is then carried out by the microcontroller that acts as the motor/servo controller. Detailed descriptions of each subsystem are provided in their respective pages.