Our functional architecture can be broken up into two main subsections:
- Perception
- Path Planning/Control
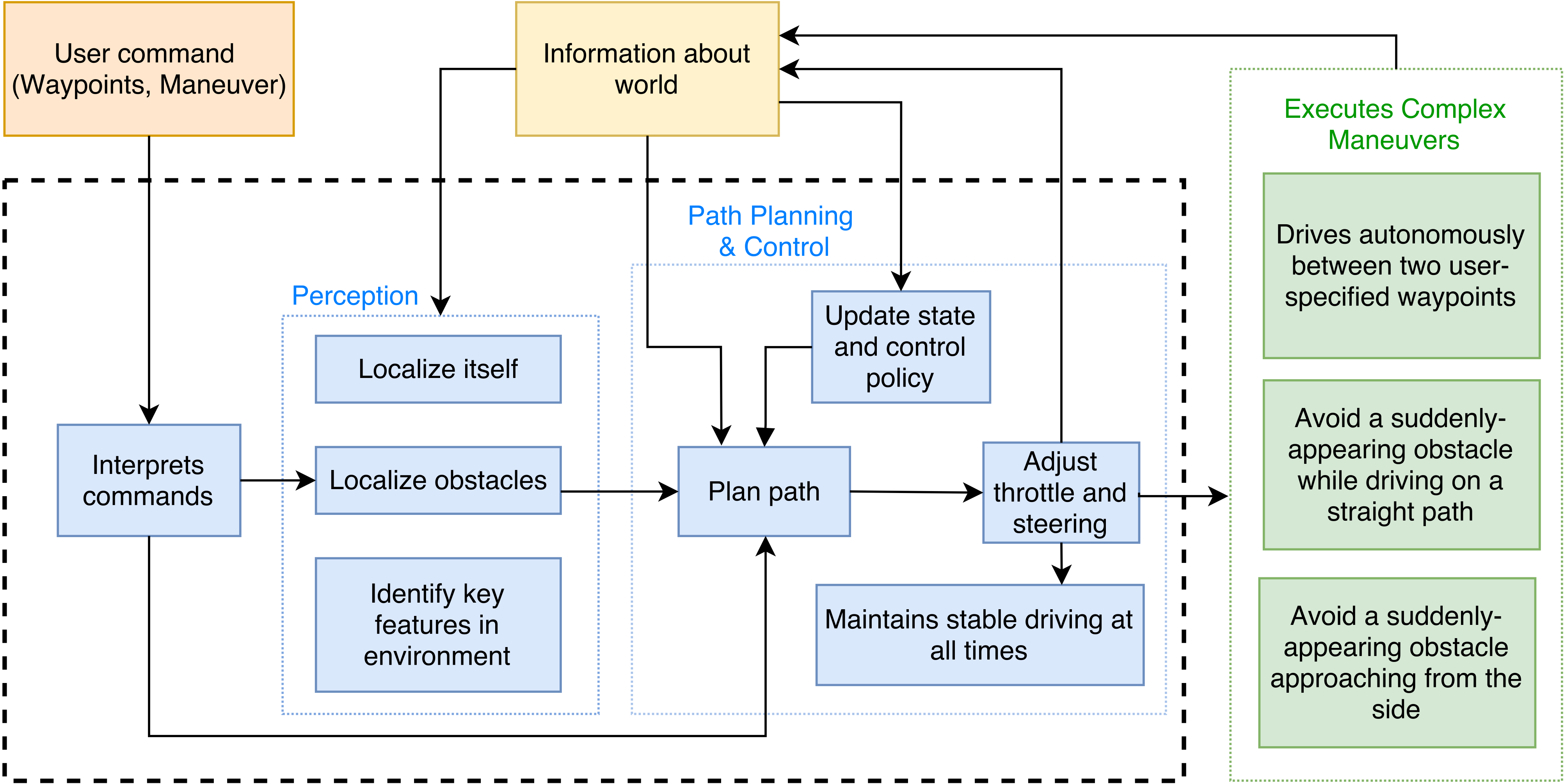
The user will give the system a command in the form of a waypoint (or set of waypoints), or a desired maneuver. The system will then interpret this command to determine its objectives in the perception and path planning sections.
The perception section will take in information about the world through sensor readings, and use them to localize itself as wells as obstacles in the environment. It will then feed this information to path planner, which will calculate a trajectory and control outputs that will make the desired behavior possible. This gets executed by the actuators, which affects the world and leads to new sensor readings, thus completing the feedback loop.