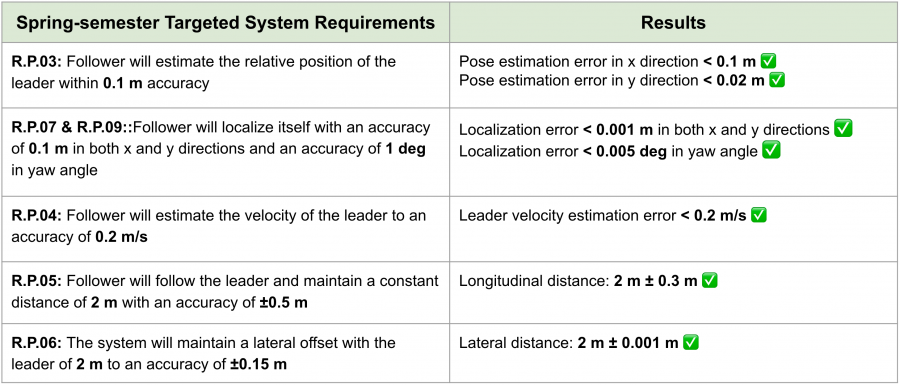
Demonstration 1 — Simulation
What you will see
- Leader ice resurfacer detection as well as pose and velocity estimation
- Follower ice resurfacer localization
- Fully functional leader follower system
Live Demo
Success Criteria
- Follower will estimate the relative position of the leader within 0.1 m accuracy
- Follower will localize itself with an accuracy of 0.1 m in both x and y directions and an accuracy of 1 deg in yaw angle
- Follower will estimate the velocity of the leader to an accuracy of 0.2 m/s
- Follower will follow the leader and maintain a constant distance of 2m with an accuracy of ±0.5m
- The system will maintain a lateral offset with the leader of 2m to an accuracy of ±0.15m
The following slideshow includes validations of each subsystem in simulation: Perception, Localization, Velocity Estimation, and Offset Maintenance in a fully functional leader-following system.
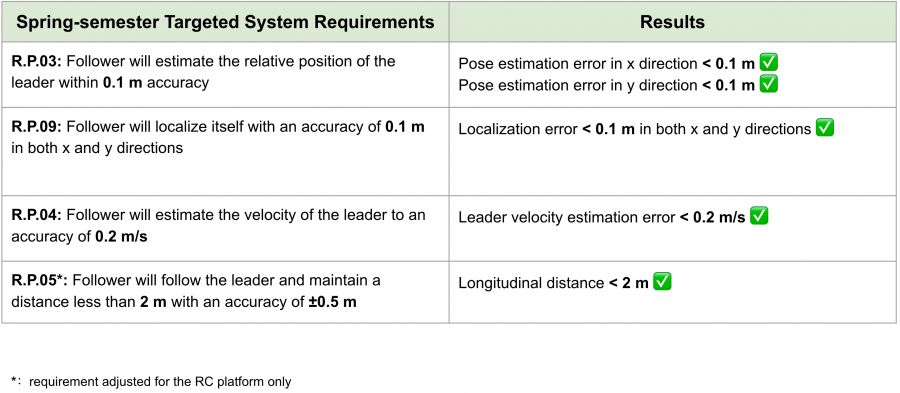
Demonstration 2 — Hardware Platform (RC Car + Husky UGV)
What you will see
- Leader (Husky UGV) detection as well as pose and velocity estimation
- Follower (RC Car) localization
- Fully functional leader follower system
Live Demo
Success Criteria
- Follower will estimate the relative position of the leader within 0.1 m accuracy
- Follower will localize itself with accuracy of 0.1 m in both x and y direction and the accuracy of 1 deg in yaw angle
- Follower will estimate the velocity of the leader to an accuracy of 0.2 m/s
- Follower will follow the leader and maintain a distance less than 2m
The following slideshow includes validations of each subsystem on the hardware platform: Perception, Localization, Velocity Estimation, and Control.