Zamboni, an ice resurfacer, is a vehicle used to clean and smooth the surface of a sheet of ice in an ice rink. It’s commonly seen in any ice hockey game or an ice skating rink. To guarantee the skating smoothness as well as the safety of athletes or players on the ice, Zamboni plays a crucial role in maintaining a pristine skating surface. It operates by shaving the top layer of ice off of the ice rink, washing the remaining ice, and then spreading out an even layer of water that freezes in between periods/skate times.
Similar to any vehicle, a Zamboni is not going to function well without a good Zamboni driver. The National Hockey League (NHL) will usually pay Zamboni drivers $29,000 ~ $31,000 annually as the salary, and most of the drivers work part-time or seasonally. Besides, it usually takes $2$ to $3$ weeks to train a Zamboni driver. However, even though Zamboni drivers are both well-paid and well-trained, there still exists inaccuracies in the quality of ice resurfacing due to inevitable human errors. Moreover, a number of accidents where drivers were injured during the operation already happened. Therefore, there has been an increasing need of automating Zamboni so as to not only reduce the budget but also increase the reliability and safety of ice resurfacing.
This project will be the first step towards autonomous ice resurfacing, where an automated Zamboni vehicle will be developed to follow a human operated one with a lateral offset. The project will involve converting an existing Zamboni vehicle to a drive-by-wire platform, equipping it with necessary sensing and computing components, running system identification and vehicle modeling experiments, and developing the autonomy software to achieve and demonstrate autonomous leader-follower functionality. This capability will establish the foundation for completely autonomous ice resurfacing operations that would address various needs in the industry as detailed above.
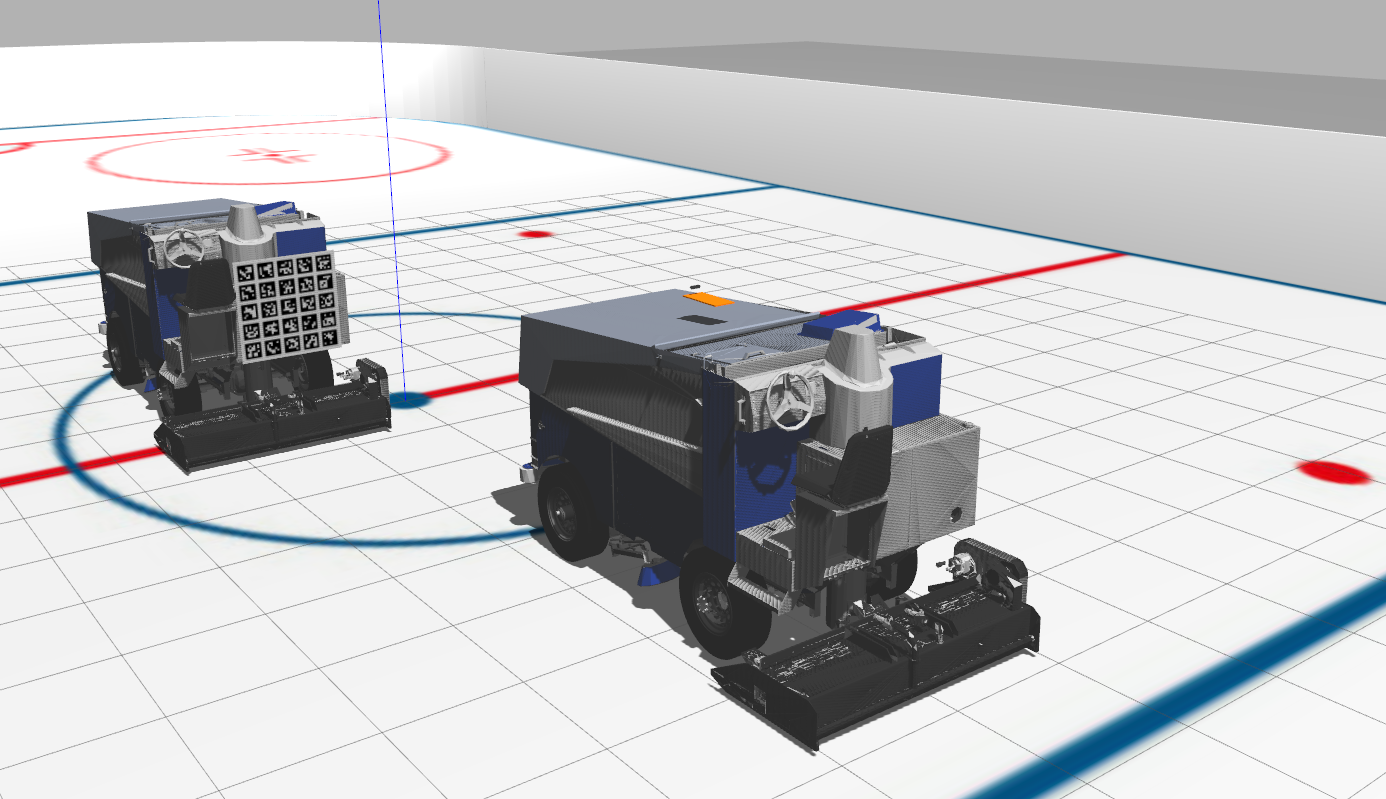
Figure 1. Leader and Follower Zamboni in Gazebo simulation