
The photometric calibration is to generate the camera inverse response function. This depends on the exposure time. Longer exposure times (or integration times) mean that more light will hit the camera sensor. Hence, pixel values will look brighter. Similarly, if the exposure time is shorter, less light will accumulate on the sensor. Hence, pixel values will appear darker. This change in intensity is usually called the camera response function, describing how the hardware responds to light.
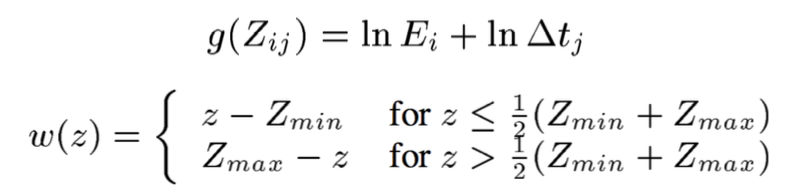
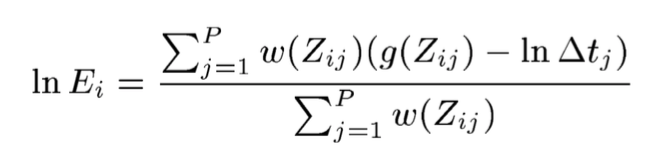
In other words, the hardware response to variations in exposure X (which is the product of the irradiance E the film receives and the exposure time t). We can then implement the algorithm according to the following formula to get the inverse response function and the irradiance for each pixel (the pixel value Z and the exposure time t is known).
More images at different exposure time tend to give better results.
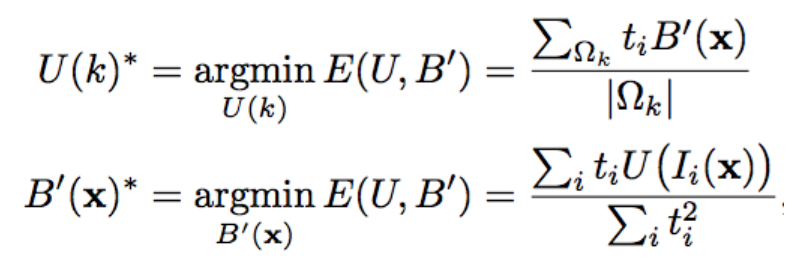
Method 1:
Method 2:

For RGB cameras, we need to generate the camera inverse response function curve for each color channel, and we need to remove the bayer pattern before split RGB channels.
The general pipeline of photometric calibration for RGB cameras is as follows:

Fig 1. Photometric calibration pipeline
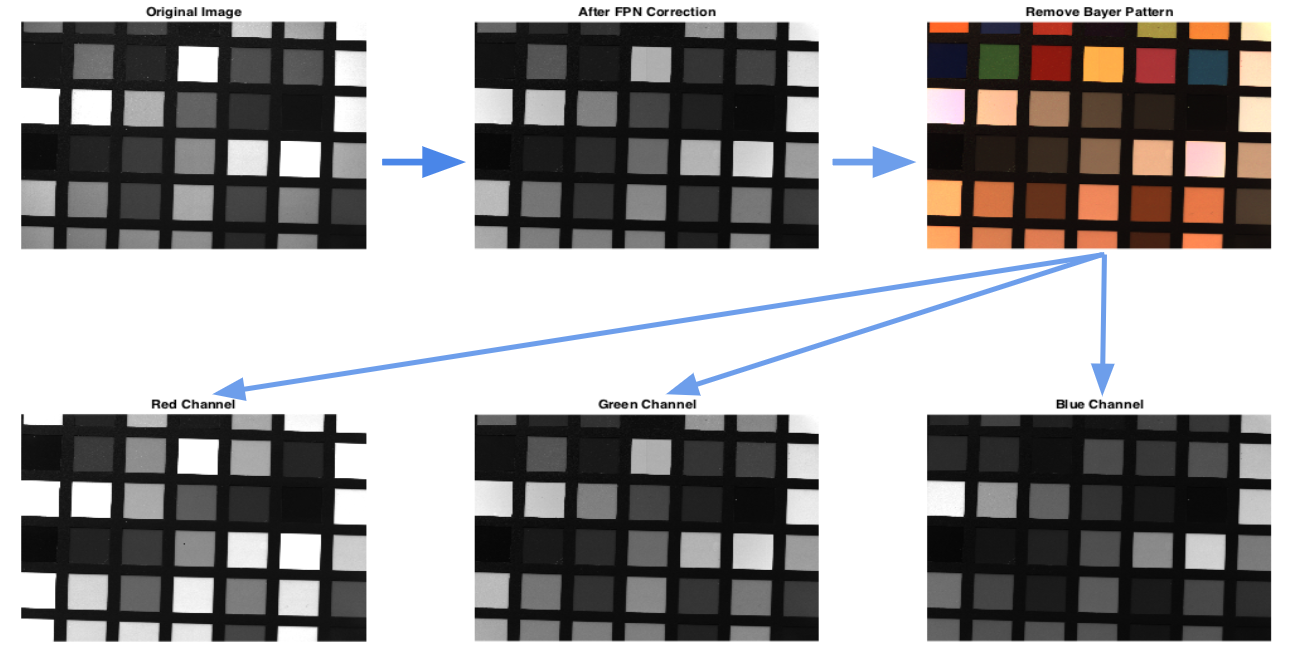
Fig 2. Image processing process in photometric calibration
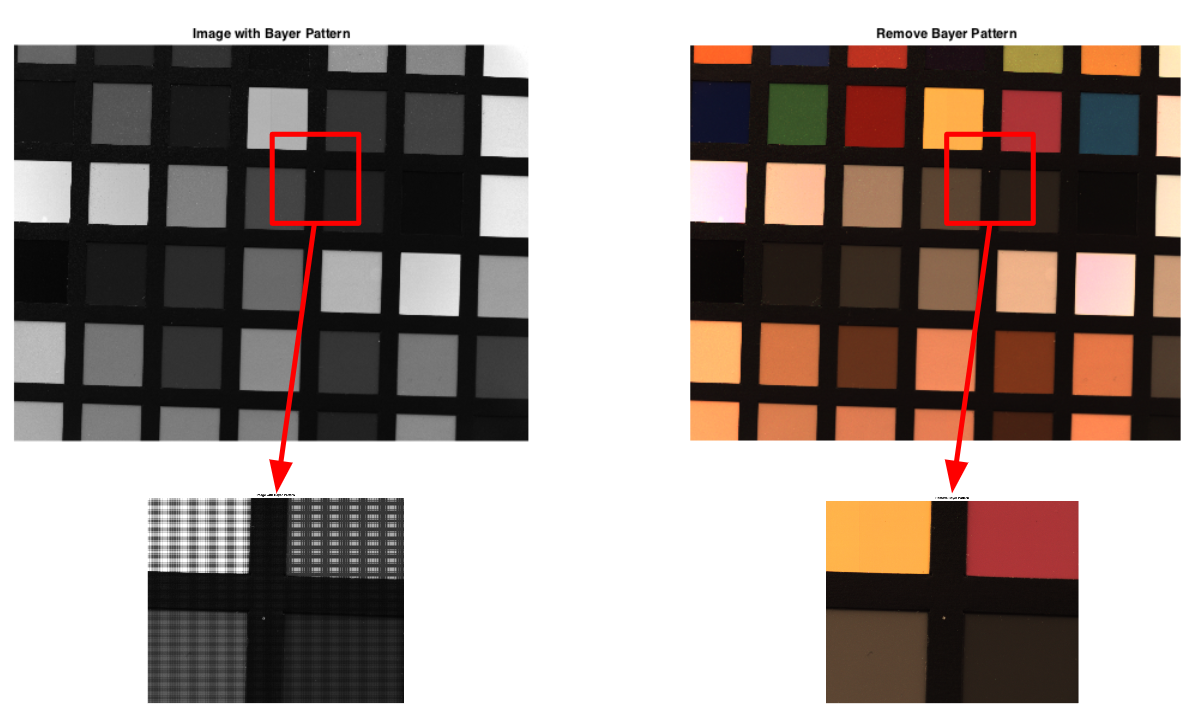
Fig 3. Image with bayer pattern (left) and without bayer pattern (right)
The result we get is as follows, a line of specific color represents the camera response of the corresponding channel:
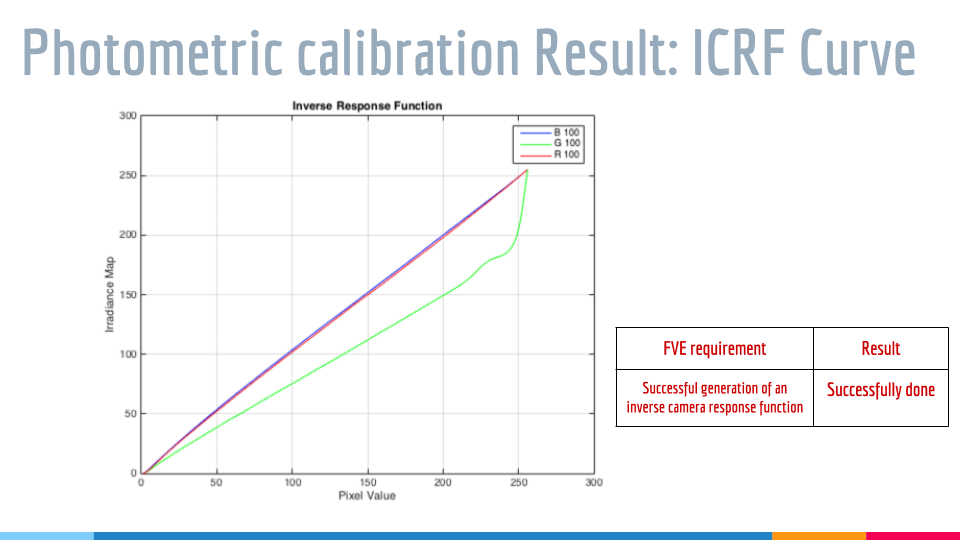
Fig 4. Camera inverse response function curve